
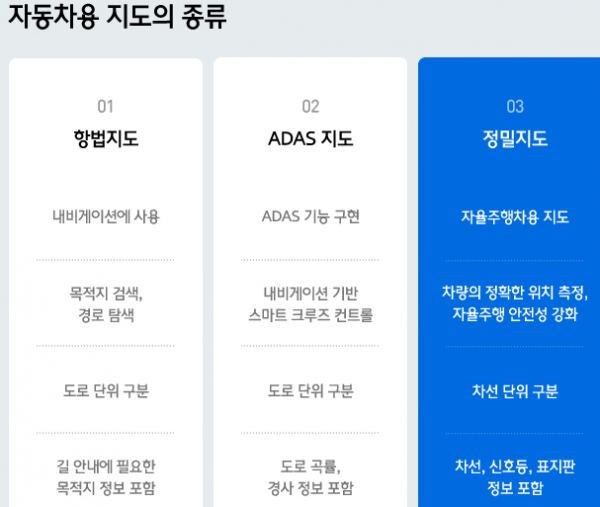
자동차용 지도는 크게 항법지도와 ADAS지도, 정밀지도로 나뉩니다.
우선 항법지도는 일반 양산차나 스마트폰에서 흔히 볼 수 있는 내비게이션에
들어 있는 지도라고 보면 됩니다.
주로 도로 단위의 정보를 표현하는데 목적지를 찾아 그곳까지 향하는
경로를 탐색하는 데 쓰입니다.
ADAS지도는 여기서 좀 더 진보한 개념으로, 도로의 곡률과 경사에 대한
정보를 담고 있어 자동차의 ADAS 기능이 정교하게 작동할 수 있도록
뒷받침하죠.
이를 활용한 대표적인 기술이 바로 현대·기아차에 적용된 내비게이션
기반 스마트 크루즈 컨트롤(NSCC-C, Navigation-based Smart Cruise Control)
입니다.
심하게 휘어진 커브길에서 자동으로 속도를 낮춰주는 기능이죠.
차에 달린 카메라와 센서만으로는 가까운 거리밖에 인식하지 못하기
때문에 ADAS지도가 필요한 겁니다.
정밀지도는 여기서 한 단계 더 나아갑니다.
항법지도와 ADAS지도는 도로 단위로만 인식이 가능하지만,
정밀지도는 각 차선 단위까지 상세하게 표현할 수 있습니다.
중앙선이나 신호등 같은 도로 위의 상세한 데이터까지 표현할 수 있죠.
지도가 이렇게 정밀하면 훨씬 효율적이고 안전한 운행이 가능합니다.
예컨대 눈이 오거나 안개가 짙게 끼기라도 한다면 자율주행차에 달린
카메라와 센서만으로는 주변 상황을 제대로 인지할 수 없습니다.
하지만 지도가 도로의 모든 상황을 알려줄 수 있다면, 날씨는 크게 중요하지
않습니다.
안전한 자율주행을 위해 정확한 정밀지도가 필요한 이유입니다
 |
#자동차용지도#
 22025년 제22회 베라쟈프 국제모델위원회 경주도자기축제 박옥순 디자이너 패션쇼
22025년 제22회 베라쟈프 국제모델위원회 경주도자기축제 박옥순 디자이너 패션쇼
